
Korábban már volt szó arról, hogyan kell megtanulni jól repülni, arról is beszéltünk, hogy milyen helikopterrel érdemes egyáltalán elkezdeni, vagy mivel érdemes komolyabban tanulni. De hogy is kell egyáltalán irányítani, mi a nehéz ebben? Annyi kérdés érkezett ezzel kapcsolatban, hogy eljött az idő, egy komplex válaszadásra.

Alapvetően két világot különböztessünk meg: fixed pitch és collective pitch. A fixed pitch gépek esetén (ezek jellemzően a játékok) a helikopter emelkedését a rotorlapátok sebessége határozza meg, mivel az állásszög állandó, azaz "fixed". Ez azért fontos, mert a két kategória beállítása és irányítása más.
Fixed pitch helikopterek

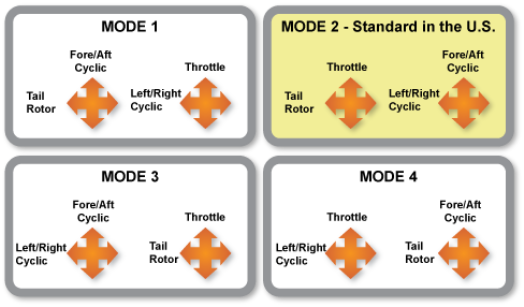
A rádiók vagy távirányítók különböző funkciókiosztásban kerülnek az üzletekbe, amiket "Mode 1, Mode 2, Mode 3, Mode 4" jelöléssel írnak le. Európában a Mode 2 és 4 a jellemző kiosztás. Mode 2 esetén a bal oldali boton van az emelkedés és az oldalkormány, azaz a fordulás, míg a jobb oldali boton az előre/hátra, balra/jobbra döntés. Mode 4 esetén a balra/jobbra döntés és a fordulás egymással fel vannak cserélve. Ha egy funkció hiányzik (3 csatornás helikopterek esetén), akkor annak a helye ki van hagyva. Ezek a gépek jellemzően Mode 4-es kiosztással érkeznek, tehát a fordulás jobbra van kiosztva, míg a bal oldali botot csak fel és le lehet mozgatni.
Az irányítás relatív primitív, azaz könnyen elmondható: Emelkedni vagy süllyedni a bal bot mozgatásával lehet. Ha legalul van a bot, akkor a motor áll, ha legfelül van, akkor teljes teljesítményen forog. A helikopter ennek függvényében emelkedik. A jobb oldali bot előre tolásával előre lehet haladni, míg a hátrahúzással hátrafelé. A helikopter addig megy előre, amíg a botot tolom, ahogy elengedtem, stabil helyzetbe kerül és a kis tömeg/nagy felület miatt relatív gyorsan meg is áll. Az oldalkormány használatával fordulunk balra vagy jobbra, míg - ha van rá lehetőség - a csűrő használatával csúsztathatjuk a helikoptert balra vagy jobbra. Értelemszerűen a botok használata lineáris, azaz kicsit mozdítom, kicsit mozog az adott irányba, nagyot mozdítok, nagyot mozdul az adott irányba a helikopter.
Minden irányt addig követ a gép, amíg az ki van vezérelve. Ha elengedtem a botot, a helikopter abbahagyja az adott irányú mozgást. Emiatt nagyon könnyű irányítani a helikoptert, hiszen ha valamit nem akarok, akkor nem adok rá utasítást és ez bőven elegendő. Ezt az irányítást sem elmagyarázni, sem megérteni nem nehéz, ezért alkalmazzák a koaxiális és játékhelikopterek esetén.
A fixed pitch helikopterek egyébként is rendelkeznek egy önstabilizáló képességgel, aminek köszönhetően irányítás nélkül sem dőlnek és ha nincs szél vagy külső erőhatás, relatív egy helyben képesek maradni. A rotorfordulatszám még maximális érték mellett is alacsony, a tömeg kicsi, így játék célokra teljesen alkalmasak, kevésbé veszélyesek, mint a nagytestvérek.
Collective pitch helikopterek

Látszólag ugyanaz és mégis teljesen más. A helikopter rotorja, azaz a forgószárny, valamint a farokrotor azaz a faroklégcsavar (relatív) állandó sebességgel forog, az irányok nagyságát a lapátok állásszöge határozza meg. A farokrotor fix áttételezésű a forgószárnyhoz képest, így azok együtt, bár nem egyforma sebességgel forognak. A helikopter nem stabil szerkezet, önstabilizáció legfeljebb csak a helyzet és nem a hely megtartása érdekében van, ennek megfelelően kell irányítani.
Gyors, kevésbé tudományos megfogalmazással, a helikopter akkor marad egy helyben, ha a forgószárny pontosan függőlegesen tolja a levegőt, azaz pontosan vízszintes a talajhoz képest. Ha ebben a legapróbb eltérés is fellelhető, a rotor már oldalirányú erőt is generál, tehát valamerre tolja a helikoptert. A tolóerő nagysága a rotor forgási síkjának a dőlésszögétől függ, azaz ha kicsit dől a rotor, akkor lassan halad a helikopter, ha a nagyon dől, akkor gyorsan halad a helikopter. Viszont minél inkább dől, annál nagyobb felhajtóerőt kell termelni az adott magasságon maradáshoz, ahhoz viszont növelni kell a lapátok állásszögét, ami viszont a tolóerőben is megmutatkozik. Látszik, hogy az egész tiszta egyensúlyozás.

Értelemszerűen a rotor maga nem dönthető, csak a helikopterrel együtt, mivel a főtengely fix. Viszont a lapátok állásszöge nemcsak kollektív (teljes kör mentén), hanem egy forgás cikluson belül is változtatható (ciklikus állásszög). Ennek segítségével dől a helikopter a kör mentén bármerre. Amerre dől, arra halad, vagyis ha előre dől, akkor előre, ha oldalra akkor oldalra, ha hátra akkor hátrafelé halad. Viszont a helikopter döntése addig tart, amíg húzom vagy tolom a botot. Amikor abbahagyom, a helikopter a helyzetét megtartja, azaz nem dől tovább, de a döntésből eredő tolóerő megmarad, tehát ha meg akarom ezt szüntetni, akkor ellen kell döntsem és meg kell fékezzem a folyamatot, azaz az irányítást nem lehet csak úgy abbahagyni, hanem aktívan semlegesíteni kell a hatásokat. És ez a folyamat a felszállástól a leszállásig tart a tér minden irányában.
Persze ez sem teljesen így igaz, mert létezik némi önstabilizáció (főleg az igazi helikoptereknél), azaz a gép igyekszik vízszintes helyzetbe kerülni, de ez ellen a modellhelikoptereknél elektronikát vagy flybar megoldásokat használunk, így a helikopter addig tartja helyzetét (nem helyét), amíg annak megváltoztatására utasítást nem adunk. Abszolút igaz a fizikai törvény: minden helikopter addig marad nyugalmi állapotban, illetve addig folytatja egyenes vonalú egyenletes (egyenletesen változó) mozgását, amíg bothatás ( :) ) nem éri.
És akkor a gyakorlatban. Az irányok a rádión megegyeznek a korábban már említett fixed pitch irányításban foglaltakkal. Ugyanaz a kiosztási besorolás, azzal a különbséggel, hogy Európában szinte kizárólag Mode 2 létezik, ezért ezt érdemes
megtanulni. Az már csak extra érdekesség, hogy az régebbi generációkhoz tartozó pilóták húzzák a pitch botot (tehát akkor emelkedik a helikopter, ha a botot maga felé húzza - akár az igazi helikopter kollektív karja), az újabb generációs pilóták viszont tolják. Látszik, hogy nincs egyértelmű beállítás.
Az irányíthatóság a legapróbb részletekig programozható. Alapvető tény, hogy összesen két bot és négy irány áll a rendelkezésünkre, ezért a motor működését más módon kell irányítani. Ráadásul a nitrometán vagy belsőégésű motorok, gázturbinák vagy elektromotorok vezérlése is más programozást, más ismereteket kíván, ezért most csak az elektromos meghajtást nézzük meg.
Szerencsére a fordulatszám közel állandó kell legyen, így nagyjából a be és ki állapotok között elegendő lenne váltani, de azért mégsem ilyen egyszerű a dolog.
Az első, hogy a motorok kétféle üzemmód szerint működnek: gázgörbe vagy fordulatszám-szabályzó üzemmód (GOV, governor) létezik. A két üzemmód között váltani menet közben nem lehet, tehát programozás alkalmával kell eldönteni, hogy melyiket használjuk. A döntés sok szempont alapján születhet meg, de talán a legfontosabb az alkalmazott összetevők (sebességszabályzó elektronika vagy ESC, motor, akkumulátor) típusa, tulajdonságai határozzák meg, hogy melyik üzemmódot választjuk.
Gázgörbe esetén a motor vezérlését a kollektív botra, azaz a bal botra rámixeljük, azaz az adott állásszöghöz képest adjuk ki a teljesítményt. Ugyanez fordulatszám szabályzás esetén állandó értéken van, tehát gázegyenes és nem gázgörbe van, a fordulatszám terheléstől függetlenül állandó értéken van.
Amikor azt mondam, hogy minden programozható, úgy is értettem: állásszögek, motor működtetése, érzékenységek mind programozhatók, ezért nincs két egyforma beállítás, ahogy az autóban is mindenki másképp ül, máshogyan használja a visszapillantót. Ajánlások, illetve kötelező érvényű ajánlások léteznek. Úgyhogy most vegyünk egy ilyet.
A rádión az Idle kapcsolónak általában több fokozata van, de most legyen ez az Idle 0, 1, 2. Ezzel a kapcsolóval kapcsoljuk ki vagy be a motort. 0-ban a motor ki van kapcsolva attól függetlenül, hogy a bal bot hogyan áll. Tehát minden irányítás adott, de a motor sosem forog. Éppen ezért ez az állapot alkalmas lenne egy autórotációra, de mégse ezt tanuljuk meg, hanem erre egy külön kapcsolót kell felprogramozni (throttle-hold - az ok: még véletlenül se idegződjön be rossz kapcsolóállás, ugyanis belsőégésű motorok esetén a 0 állásban fix 0 és -2 fok közötti állásszöget szokás felprogramozni, az meg ugyebár a levegőben nem túl szerencsés)
Az 1-re mondjuk egy kicsit alacsonyabb, a 2-re egy kicsit magasabb fordulatszámot állítunk be. A jobb oldali bot viselkedése túl sok magyarázatot nem igényel, majd az expo vezérlésre egy picit kitérünk. Ugyanez igaz a bal boton levő oldalkormányra is, de a pitch/throttle azaz kollektív állásszög/motor botot azért boncoljuk egy picit tovább.
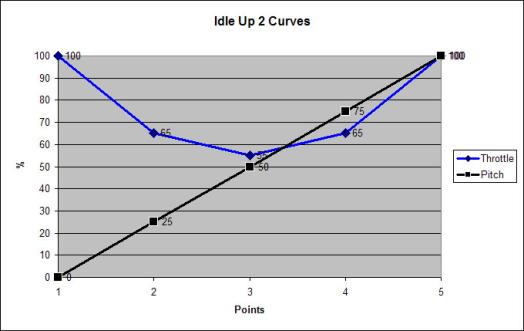
A bot programját 5 állással tudjuk leírni. A legalsó állás a 0%, a legfelső a 100%, a kettő közötti pedig a 25-50-75%-os pontokat adjuk meg. Ezzel egy 5 pontból álló görbét határozunk meg. A bot két dolgot fog vezérelni, a motort és a lapátok kollektív állásszögét. A kollektív állásszög mindhárom kapcsolóállás esetén 0-25-50-75-100% legyen. Vagyis, ha a helikopter állásszög-tartománya -12° és +12° között állítható, a bal bot állásától függően legalul -12°-on fog állni, középen 0 fokon teljesen feltolt állásban +12°-on lesz a kollektív érték. Félig lehúzott esetben -6°, félig feltolt esetben +6° lesz.
Máris látszik az első különbség a fixed pitch helikopterekhez képest: a kiinduló állapot nem a teljesen lehúzott bot lesz, hanem a középen álló. Az első időszakban pedig a bot csak a teljes használható út bő felső felét fogja használni, vagyis nagyjából -3 és +12 fok között. Majd a háton repülésnél illetve az autorotációnál jut nagyobb szerep az alsó tartománynak.
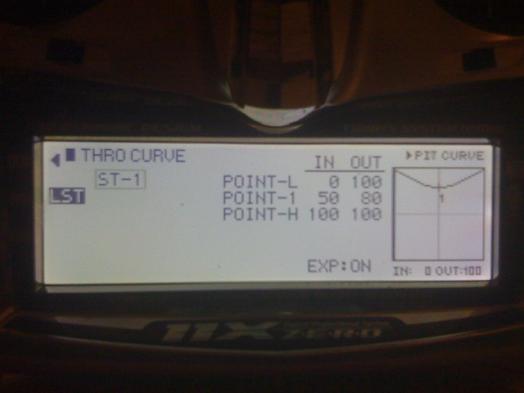
Most, hogy ismerjük a kollektív állásszög beállítását, mixeljünk hozzá egy motort. Az egyszerűség/bonyolultság kedvéért használjunk gázgörbét. Idle 0-ban az állás 0-0-0-0-0% lesz. Ezért a motor a bot állásától függetlenül sehol nem indul el. Idle 1-ben mondjuk 75-72-70-72-75%, míg Idle 2-ben: 90-87-85-87-90%. Jól látszik, hogy a motor a legkisebb teljesítményen középen üzemel, hiszen ilyenkor nincs állászöge a lapátoknak, tehát terheletlenül forognak. Persze a százalékos különbségek géptípustól és motortól függően változhatnak, de az elv minden esetben a közel V alakú gázgörbe. GOV esetén ez a V egyenes, mivel a fordulatszám szabályzásáról és a szükséges teljesítmény leadásáról a szabályzó gondoskodik: 83-83-83-83-83%.
Az elmélet ilyen rövid kivesézése után, jöjjön a gyakorlat. A felszállás egyszerűnek tűnik: botok középen, motor bekapcsol. Megvárjuk az üzemi fordulatot, majd a bal botot kicsit felfelé toljuk. Ezzel elkezdtük növelni az állásszöget, a helikopter emelkedik. Igenám, de csúszik is, méghozzá ideális esetben balra. Az ok: jobbra forgós helikopterünket tolja le a farokrotor az eredeti helyéről, és csúszunk a légpárnán. Ezért a gépet egy picit jobbra be kell dönteni, hogy ellensúlyozzuk az erőhatást. De sajnos a helikopter a legkisebb botmozdulatra is gyorsan reagál, és túlzottan érzékeny.
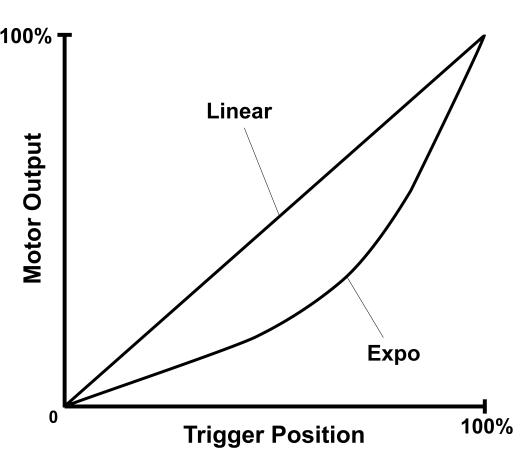
Ilyenkor a vezérlés finomságát lehet csillapítani - persze csak egészséges mértékben szabad, különben átesünk a ló túloldalára, amikor szinte érzéketlenné válik a vezérlésünk, majd hirtelen meglódul. Ez a beállítás az expo. A vezérlés finomságát a lineáristól el lehet téríteni az oldalkormány, a csúrű és a magassági kormány esetén, azaz a kollektív állásszöget leszámítva mindenhol, méghozzá irányonként függetlenül. Az exponenciális érték megadásával tudjuk torzítani az egyenest. Negatív irányban kevésbé lesz érzékeny az elején, pozitív irányban érzékenyebbé válik az első szakaszban a bot. Főleg kezdőknek, főleg kisebb gépeknél -10 és -20% közötti értéket be szokás állítani, hogy kevésbé legyen kapkodós az irányítás. Ráadásul ez a beállítás is kapcsolóra tehető, így akár két érték között válthatunk repülés közben.
Ha sikerült értelmezni az itt leírtakat, akkor gondolhatnánk: jöhet a repülés. De erősen óvnék ettől mindenkit: először szimulátoron kell elsajátítani a rádió használatát is. A kollektív állásszöggel működtetett helikoptereknél nincs olyan lehetőség, hogy mindent elengedek, mert az töréshez, balesethez vezet. Ezeket a helikoptereket vezetni kell, minden pillanatban irányítanunk kell. A stabil irányításhoz pedig szükséges, hogy a rádiónk minden elemét pontosan ismerjük, mert adott pillanatban nem lesz idő keresgetni a megfelelő kapcsolót, a megfelelő bot állást.




